环境感知:集成激光雷达、深度摄像头、超声波等多种传感器,实现高精度环境地图构建、实时定位、障碍物检测(静态/动态)及场景理解。
操作感知:利用视觉进行目标识别、姿态估计、精确定位;力矩传感器实现精准的力控制、柔顺操作、碰撞检测及安全响应。
融合算法:通过算法将来自不同传感器的异构数据进行时空同步、关联和融合,生成更准确的状态和任务状态信息。

任务规划:基于任务目标、环境状态和自身能力,分解复杂任务为可执行的子任务序列。
路径规划:在复杂动态环境中,实时规划安全、高效的无碰撞移动路径和操作臂运动轨迹。考虑动态障碍物预测和避让。
AI驱动决策:应用机器学习、计算机视觉算法和具身智能多模态大模型(VLA)提升环境理解、任务泛化、异常处理。

移动平台控制:实现精准的定位导航、稳定移动、动态避障和路径跟踪。
操作臂控制:实现高精度的点位运动(PTP)、连续路径运动(CP)、力位混合控制、柔顺装配等。

硬件模块化:移动平台、操作臂、末端执行器(EOAT)、传感器模块等采用标准化接口设计,便于按需配置、更换和升级。
软件架构:采用分层、解耦的架构设计,支持功能模块的灵活组合和二次开发。
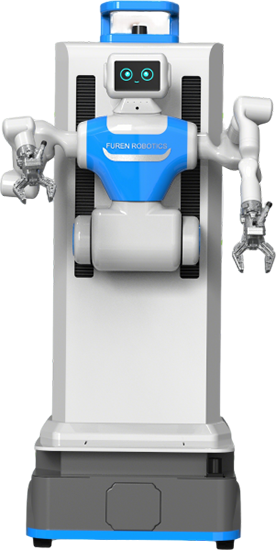
| 尺寸 | 900*626*1650mm |
| 重量 | 200Kg |
| 工作范围 | 800mm |
| 底盘类型 | 四驱底盘 |
| 直线移动速度 | 1m/s |
| 转向速度 | 6.76rad/s |
| 行走模式 | 轮式 |
| 环境温度 | 0-45℃ |
| 充电方式 | 无线充电(手动充电) |
| 电池容量 | 2.5kWh 高能量密度电池组 |
| 续航时间 | 6 小时 |
| 末端执行器型式 | 支持扩展 |